快科技4月1日消息,高德宣布正式全量开源全球首个基于统一架构的机器人具身操作基座模型ABot-M0。
该模型实现了一个通用大脑适配多种形态的具身机器人,为具身智能领域的发展提供了全新的通用技术基座。
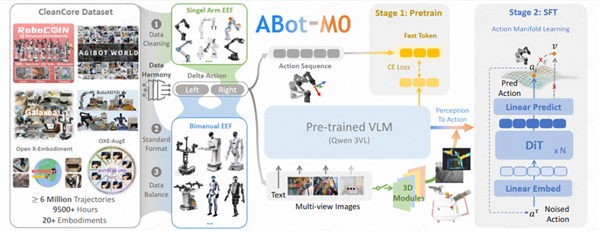
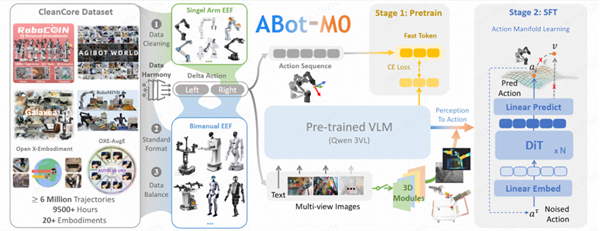
ABot-M0模型架构图
ABot-M0的技术实力在权威测试中得到充分验证,在Libero、Libero-Plus、RoboCasa等多个基准测试中均实现最优表现,其中在Libero-Plus基准上任务成功率达80.5%,较业界此前标杆方案提升近30%,空间理解与任务执行能力表现亮眼。
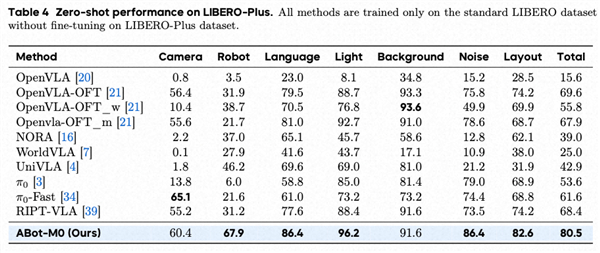
ABot-M0在Libero-Plus的评测结果
此次开源覆盖数据、算法与模型三大核心维度,全方位突破行业发展难点。
数据层面,开源规模最大的通用机器人数据集UniACT,整合超600万条真实操作轨迹,通过标准化处理让全球异构机器人数据可统一使用;
算法层面,创新推出动作流形学习算法与双流感知架构,前者让模型直接预测可行动作序列,提升解码效率,后者弥补了3D推理短板,强化空间理解能力;
模型层面,开源端到端预训练模型与完整工具链,开发者可快速适配工业、家庭等多元场景。
ABot-M0的统一架构,成功验证了一个大脑驱动多种形态机器人的可行性,为具身智能技术落地提供了开箱即用的解决方案。

【本文结束】如需转载请务必注明出处:快科技
责任编辑:随心
https://finance.sina.com.cn/tech/discovery/2026-04-01/doc-inhsxvfa2814293.shtml

Leave Your Comment Here